この記事はMATLAB/Simulink Advent Calendar 2023の15日目の記事として書かれています。
また、本記事のスクリプトなどは以下のページにアップロードされています。
はじめに
LiDAR(Light Detection and Ranging)は、主にレーザー光線を物体に照射することで対象までの距離を測定します。それにより、周辺の障害物を検知したり、その環境の3次元的な地図を作成したりすることができます。
LiDARは多くの種類がありますが、その中でもVelodyne LiDARが有名です。本記事では、Velodyne LiDARのパケットキャプチャ(pcap)ファイルを再生し、3次元点群データを可視化する方法について紹介します。
MATLABにてVelodyne LiDARのデータを可視化した時の様子を示します。MATLABを利用すれば、特別なセットアップも必要なく、簡単に可視化することができます。
Velodyne HDL32Eについて
以下にVelodyne HDL32Eの画像を掲載します。

また、塩沢ら(2013)にてまとめられたVelodyne HDL32Eの性能について以下に掲載します。
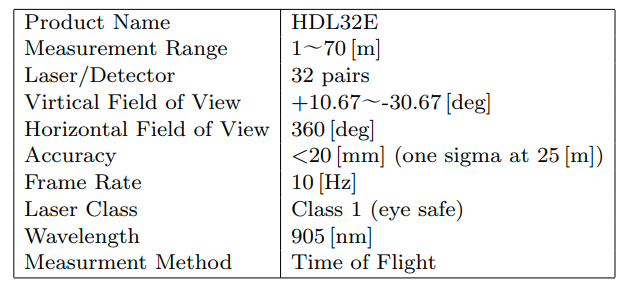
塩沢ら(2013): Velodyne レーザスキャナを用いた上空からの三次元再構成
その他のLiDARについてや、LiDARの利活用の例などについて以下のページがわかりやすかったです。
MATLABを利用したVelodyne HDL32Eデータの可視化
点群の可視化について
- pcplayer を利用して、時系列の点群データを再生することができます。
- xlimitsなどを定義することで可視化する点群の範囲を指定できます。
点群の読み取りについて
- velodyneFileReader を利用することで、Velodyne LiDARのデータを読み取ることができます。
- ここでは、HDL32Eという機種名を設定しました。
- readFrame 関数で1つずつ点群を読み取っていきます。
フレームごとの表示ついて
- view 関数で、さきほど定義したpcplayerを入力し、さらにそのプレイヤー上で見せる点群のXYZ情報や色付けするときのベースとなる反射強度(intensity)の情報を入力します。
まとめると以下のようになります。
clear;clc;close all % Velodyne Lidarデータの読み取りと可視化のためのMATLABコード % Velodyneファイルリーダーの作成 veloReader = velodyneFileReader('lidarData_ConstructionRoad.pcap','HDL32E'); % 可視化のための座標軸範囲の設定 xlimits = [-60 60]; ylimits = [-60 60]; zlimits = [-20 20]; % 点群データの可視化用のプレイヤーオブジェクトの作成 player = pcplayer(xlimits,ylimits,zlimits); % 座標軸ラベルの設定 xlabel(player.Axes,'X (m)'); ylabel(player.Axes,'Y (m)'); zlabel(player.Axes,'Z (m)'); % フレームごとにVelodyneデータを読み取り、可視化 for frameNumber = 1:veloReader.NumberOfFrames % フレームごとの点群データの読み取り ptCloudObj = readFrame(veloReader, frameNumber); % 点群データの可視化 view(player, ptCloudObj.Location, ptCloudObj.Intensity); % 表示の更新と一時停止(0.1秒) pause(0.1); end

pointCloudオブジェクトの中身について
ここで、上で読み取った点群のフレームについてもう少し見てみます。
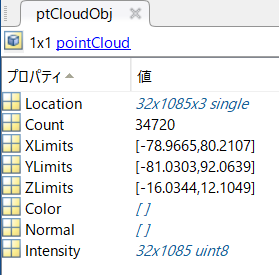
読みっとった点群はpointCloudオブジェクトとして読み取られます。
そこでは、点群を構成する点のXYZ情報(Location)や点の数(Count)、範囲(Limits)や色情報や法線ベクトルの情報、反射強度が格納されています。
Locationが以下の図では32×1085×3になっています。これは何でしょうか。
以下の図は、Velodyne VLP16の図です。16 beamsとあるように、
上下方向に16本のレーザービームがあり、それが高速に(10Hz)回転しています。
ここでは、Velodyne HDL32Eを利用しているため、32本のレーザービームごとに点が分かれていることを示しています。

それでは、32本のレーザービームを上から読み取って、可視化していきます。
% 新しいfigureを作成し、ライブスクリプトの外側で表示するように設定 figure('Visible','on'); % 1から32までのスキャンIDにわたるループ for scanId = 1:32 % ptCloudObjから指定されたスキャンIDに対応する点群データを取得 scan_i = ptCloudObj.Location(scanId,:,:); % 3D行列から2D行列に変換 scan_i = squeeze(scan_i); % 新たに点群を表示し、現在の点群を保持 pcshow(scan_i);hold on; % x、y、zの軸範囲を指定 xlim(xlimits); ylim(ylimits); zlim(zlimits) % 描画を更新 drawnow; end
実行すると、以下のように上側のスキャンから点群が可視化されていくことがわかります。
まとめ
この記事では、Velodyne LiDARのデータをMATLABを利用して可視化する方法について紹介しました。便利な関数が多く用意されており、特別なセットアップもなく、可視化ができました。
その他
この記事は、MATLABのライブスクリプトを利用して執筆されました。ライブスクリプトにてテキストや図、コードを書き、以下のコマンドで、マークダウン形式にエキスポートしています。
このマークダウン形式のデータをはてなブログにコピーアンドペーストすると効率よくブログ執筆を行うことができます。
export("visualizeHDL32E.mlx","README.md","EmbedImages",false)